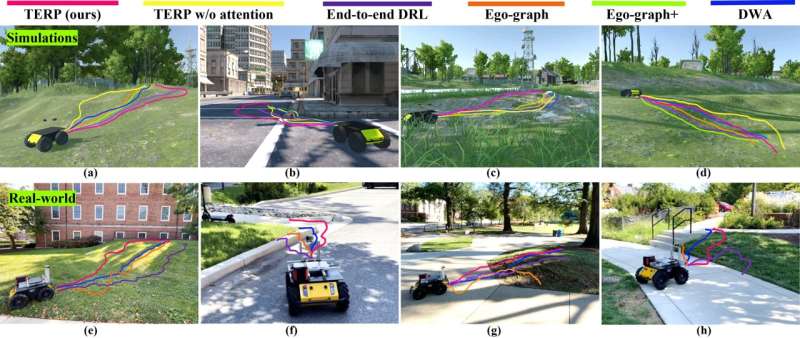
 using four different methods: our method TERP (pink), Ego-graph (orange), DWA (Blue), and end-to-end Attn-DRL method (violet). TERP generates waypoints (pink points) that are dynamically feasible and reachable by locally least-cost paths. Other methods navigate through unsafe regions with high elevation gradients which could lead to unstable robot orientations. TERP leads to trajectories with low elevation gradients with a higher success rate of goal-reaching. Credit: Weerakoon et al.")
Autonomous mobile robots are already being tested and used for such applications as the delivery of parcels, surveillance, search and rescue missions, planetary/space exploration, and the monitoring of the environment. For these robots to successfully complete their missions, they need to be able to operate safely and reliably in uneven outdoor terrains, without colliding with nearby obstacles.
Researchers at University of Maryland, College Park (UMDCP) have recently developed a new machine learning method that could improve the reliability of robot navigation in uneven outdoor terrains and in the presence of obstacles. Their study was presented by UMDCP’s GAMMA Research Group at the IEEE International Conference on Robotics and Automation 2022.
“We observed that terrain geometric features, including elevation changes or roughness, affect a robot’s movement stability significantly during navigation,” Dinesh Manocha, professor at UMDCP who led this research project, told TechXplore. “Hence, it’s essential for the robots to perceive these terrain features in the environment to make safe navigation decisions. “
Before Manocha and his students started working on their robot navigation method, the researchers closely observed the locomotion strategies of humans while they are moving around in complex outdoor environment. Interestingly, they noticed that humans did not focus on the entire environment while moving, but rather on regions in space they deem critical or important.
The robot navigation method developed by Manocha’s group was inspired by the locomotion behavior they observed in humans. This method, called TERP (Terrain Elevation-based Robot Path planning), is based on a deep reinforcement learning (DRL) technique they developed.
“Our novel hybrid machine learning architecture combines intermediate output results of our attention-based DRL network with a novel trajectory planning method,” Weerakoon , a Ph.D. student working on this project, explained. “These intermediate results help identify and avoid challenging or unsafe regions in the environment during navigation. Our approach employs a fully trained DRL network that uses elevation maps, robot pose and its goal as inputs to compute an attention mask.”
The attention mask computed by the team’s algorithm then guides a mobile robot to regions in its surrounding environment that it should place a particular focus on to achieve stable navigation. Ultimately, this mask is combined with the input elevation map produced by the method, creating a 2D navigation cost map. This map is then used to trace a safe and reliable trajectory for the robot to reach a desired location.
“In previous works, we observed a significant performance degradation in end-to-end DRL methods when transferring from simulation to real-world terrains,” Sathyamoorthy, another Ph.D. student working on this project, said. “However, our new hybrid machine learning architecture results in improved navigation performance.”
The attention component of TERP can significantly enhance a robot’s spatial awareness, simply by shifting its focus on the most critical regions for the navigation task at hand. On the other hand, the waypoint planner component of their method ensures that the robot is following the most cost-effective trajectory to reach its destination.
“TERP generates relatively stable trajectories in steep elevations to minimize the risk of robot flip-overs,” Patel, a research staff member working on this project said. “In addition, it can avoid unsafe regions and obstacles when navigating on complex terrains with static and dynamic obstacles.”
Manocha and his students evaluated their method in different real-world environments, using the Husky robot, an unmanned mobile robotic system developed by Clearpath Robotics. In their tests, the robots navigated outdoor spaces with uneven terrains, with up an elevation gain of up to 4 meters.
“We showed that our unique hybrid formulation with an attention DRL network for perception and waypoint planner for navigation leads to a high navigation success rate on complex terrains,” Manocha said. “This implies that our method significantly reduces the risk of robot flip-overs when navigating in challenging uneven terrains.”
In the team’s initial evaluations, TERP achieved remarkable results, suggesting that it can significantly improve the reliability of robot navigation in complex outdoor environments. In the future, it could be used to improve the performance of robots in numerous settings, for instance opening new possibilities for planetary and space explorations, agricultural surveys and complex environmental monitoring.
“We are planning to improve our system in the future by addressing some of its current limitations,” Manocha added. “Particularly, we observed that in addition to the terrain elevation, surface properties such as texture, bumpiness, and deformability govern navigability for a robot in complex outdoor scenarios and we are working on self-supervised learning methods to handle such scenarios. We are also extending these methods for autonomous navigation of legged robots, like Boston Dynamics Spot robot.”
A beaver-inspired method to guide the movements of a one-legged swimming robot
More information:
TERP: Reliable planning in uneven outdoor environments using deep reinforcement learning. GAMMA Group, University of Maryland, College Park (2022). arXiv:2109.05120 [cs.RO] arxiv.org/abs/2109.05120
TERP: Reliable planning in uneven outdoor environments using deep reinforcement learning. GAMMA Group, University of Maryland, College Park (2022). arXiv:2109.05120 [cs.RO] arxiv.org/abs/2109.05120
© 2022 Science X Network
Citation:
TERP: A method to achieve reliable robot navigation in uneven outdoor terrains (2022, June 2)
retrieved 2 June 2022
from https://techxplore.com/news/2022-06-terp-method-reliable-robot-uneven.html
This document is subject to copyright. Apart from any fair dealing for the purpose of private study or research, no
part may be reproduced without the written permission. The content is provided for information purposes only.
Stay connected with us on social media platform for instant update click here to join our Twitter, & Facebook
We are now on Telegram. Click here to join our channel (@TechiUpdate) and stay updated with the latest Technology headlines.
For all the latest Technology News Click Here
For the latest news and updates, follow us on Google News.
Denial of responsibility! NewsAzi is an automatic aggregator around the global media. All the content are available free on Internet. We have just arranged it in one platform for educational purpose only. In each content, the hyperlink to the primary source is specified. All trademarks belong to their rightful owners, all materials to their authors. If you are the owner of the content and do not want us to publish your materials on our website, please contact us by email – [email protected]. The content will be deleted within 24 hours.