
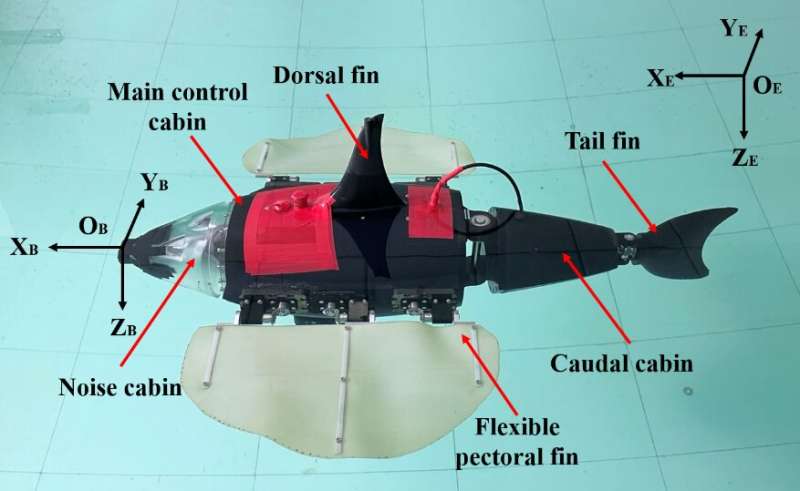
Underwater robots are being widely used as tools in a variety of marine tasks. The RobDact is one such bionic underwater vehicle, inspired by a fish called Dactylopteridae known for its enlarged pectoral fins. A research team has combined computational fluid dynamics and a force measurement experiment to study the RobDact, creating an accurate hydrodynamic model of the RobDact that allows them to better control the vehicle.
The team published their findings in Cyborg and Bionic Systems on May 31, 2022.
Underwater robots are now used for many marine tasks, including in the fishery industry, underwater exploration, and mapping. Most of the traditional underwater robots are driven by a propeller, which is effective for cruising in open waters at a stable speed. However, underwater robots often need to be able to move or hover at low speeds in turbulent waters, while performing a specific task. It is difficult for the propeller to move the robot in these conditions. Another factor when an underwater robot is moving at low speeds in unstable flowing waters is the propeller’s “twitching” movement. This twitching generates unpredictable fluid pulses that reduce the robot’s efficiency.
In recent years, researchers have worked to create underwater robots that mimic living creatures. These bionic vehicles move through the water similar to the ways fish or manta rays move. Compared with traditional underwater propulsion vehicles, these bionic underwater vehicles operate more efficiently and robustly in the water, while being environmentally friendly.
Underwater robots are affected by the surrounding fluid as they move through the water. This phenomenon is call the hydrodynamic effect. While moving in the water, the robot must deal with unknown water flow and force, which can cause unnecessary changes in the robot’s position.
To better control the robot, researchers need a more accurate hydrodynamic model. Creating this model is usually very complex and difficult. In addition, the real underwater environment is changeable and difficult to predict, so the model parameters can shift with a change in the environment. Researchers have been using computational fluid dynamics to create hydrodynamic models for underwater robots.
However, the models created with computational fluid dynamics alone are not as precise and practical as they need to be. To overcome this challenge, the research team tried a different approach. “To make the hydrodynamic model more accurate and practical, we combined the computational fluid dynamics and a force measurement experiment,” said Rui Wang, a researcher at the Institute of Automation, Chinese Academy of Sciences.
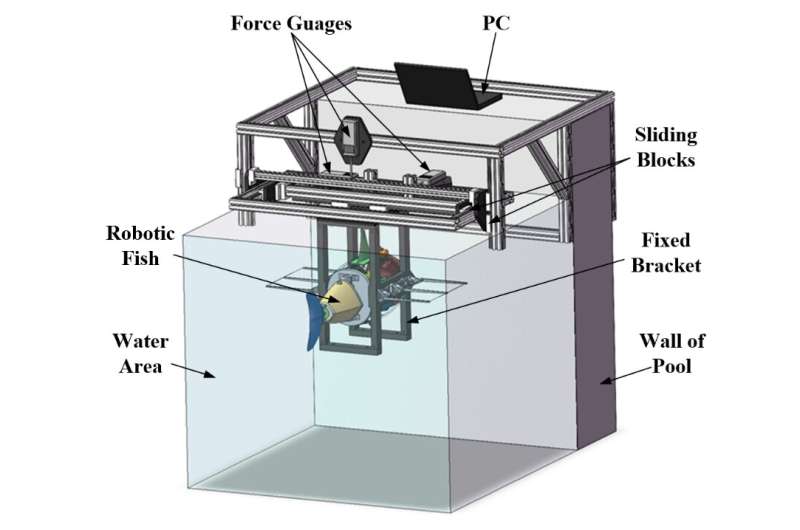
Using computational fluid dynamics, the researchers identified the parameters in the hydrodynamic model. Then they developed a force measurement platform to obtain the force generated by the RobDact vehicle. With this process, they could obtain both the disturbing force and the force generated by the RobDact in any complex environment. “This could help us have a better understanding of the underwater vehicle’s motion state, and control the underwater vehicle more accurately,” said Qiyuan Cao, a researcher at the Institute of Automation, Chinese Academy of Sciences.
With their experiment, the team was able to determine the hydrodynamic force of the RobDact at different speeds. The force measurement platform they developed allowed them to measure the force of RobDact in the X, Y, and Z direction. They established a mapping relationship between the RobDact fluctuation parameters and the thrust of the vehicle through their force measurement experiments. By merging the rigid body dynamic model of RobDact with the thrust mapping model, the researchers were able to develop an accurate and practical hydrodynamic model of the RobDact’s in varying motions.
Looking to the future, the researchers intend to study the intelligent control of bionic underwater vehicles using the hydrodynamic model in conjunction with artificial intelligence methods, such as reinforcement learning. “The ultimate goal is to promote the practical application of bionic underwater vehicles in water environment monitoring and underwater search and rescue,” said Wang.
A beaver-inspired method to guide the movements of a one-legged swimming robot
More information:
Qiyuan Cao et al, Hydrodynamic Modeling and Parameter Identification of a Bionic Underwater Vehicle: RobDact, Cyborg and Bionic Systems (2022). DOI: 10.34133/2022/9806328
Qiyuan Cao et al, Hydrodynamic Modeling and Parameter Identification of a Bionic Underwater Vehicle: RobDact, Cyborg and Bionic Systems (2022). DOI: 10.34133/2022/9806328
Provided by
Beijing Institute of Technology Press Co., Ltd
Citation:
Bionic underwater vehicle inspired by fish with enlarged pectoral fins (2022, August 23)
retrieved 23 August 2022
from https://techxplore.com/news/2022-08-bionic-underwater-vehicle-fish-enlarged.html
This document is subject to copyright. Apart from any fair dealing for the purpose of private study or research, no
part may be reproduced without the written permission. The content is provided for information purposes only.
Stay connected with us on social media platform for instant update click here to join our Twitter, & Facebook
We are now on Telegram. Click here to join our channel (@TechiUpdate) and stay updated with the latest Technology headlines.
For all the latest Technology News Click Here
For the latest news and updates, follow us on Google News.
Denial of responsibility! NewsAzi is an automatic aggregator around the global media. All the content are available free on Internet. We have just arranged it in one platform for educational purpose only. In each content, the hyperlink to the primary source is specified. All trademarks belong to their rightful owners, all materials to their authors. If you are the owner of the content and do not want us to publish your materials on our website, please contact us by email – [email protected]. The content will be deleted within 24 hours.